МЕХАНОТЕРАПИЯ
Спасибо нашим инвесторам из казино онлайн
МЕХАНОТЕРАПИЯ
, в узком смысле слова система методических упражнений, к-рые б-ной производит с леч. целью на аппаратах или при помощи аппарата. Идея заменить при врачеэных упражнениях руку гимнаста машинной силой появилась очень давно. Однако систематические применения механизированных ручных приемов относятся только к середине 19 в. В 1857 году появляется первый механотерап. прибор шведского врача Цандера (Zander). Устройство этого прибора отвечает физиологическ. законам мышечной работы. Начиная с этого времени, сравнительно за короткий срок возникло множество различных систем, разновидностей отдельных приборов, из которых наибольшее развитие получили приборы Цандера, Крукенберга и Герца (Kruken-berg, Herz). Принципы построения главнейших систем в М. Система аппаратов Цандера построена на принципе двуплечного рычага. Рычажное приспособление служит для двух целей: 1) для того, чтобы менять сопротивление для упражняющейся мышцы, 2) чтобы дозировать это сопротивление при помощи передвижения на рычаге груза. Основанием для построения прибора на принципе рычага явились следующие физиол. законы: 1) сила мышцы уменьшается по мере сокращения (закон Schwann ‘a); 2) сила мышцы увеличивается по мере того как угол, образуемый мышцей с соответствующим костным рыча-гом, приближается к прямому. При действии мышцы на костный рычаг в косом направлении сила. мышцы не может проявиться в полной мере и теряется при движении. Формулируя это в математич. выражениях, получим: величина сопротивления повышается и понижается пропорционально косинусу угла наклонения рычага с грузом. —Аппараты Цандера разделяются на следующие группы: 1) аппараты для активных движений, вернее двойственных (рисунок 1); сюда же входят аппара –
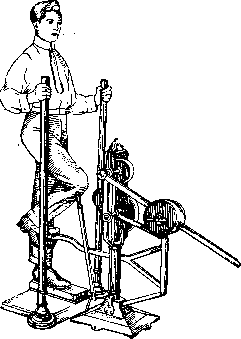
Рисунок 1. Аппарат Цандера для активных движений с сопротивлением.
ты для поступательно-прогрессирующих или •балансирующих движений; 2) аппараты для пассивных движений, массажных манипуляций и наконец 3) ортопедические аппараты для лечения различных искривлений (позвоночника и пр.). Аппараты приводятся в движение механическим мотором или посторонней ручной силой. Аппараты Цандера, построенные по принципу двуплечного рычага, применимы только для тех суставов, у к-рых мышечная работа подчиняется законам рычага (напр. локтевой сустав); при других движениях принципы эти не согласуются с физиол. движениями сустава (Bum). Если к этому прибавить, что помимо сложной автоматической конфигурации суставных поверхностей механизм движения в большой степени зависит еще и от мышечн. игры, то станет понятным, что система Цандера далеко не разрешает проблему воспитания движений, особенно при нарушении мышечного равновесия, и потому оставляет желать многого. Аппараты Крукенберга построены на принципе балансирующего маятника. В приборе перпендикулярно к оси движения висит маятник с грузом, который суммирует отдельные толчки, производимые больным, и т. о. увеличивает объем движения. Величина сопротивления в аппаратах не согласуется с кривой работоспособности мышцы в отдельных фазах движения, как это наблюдается у Цандера. Однако сила сопротивления, нарастание и ослабление противодействия при этой системе меняются уже в силу самого балансирования маятника, а также перемещения груза, которое можно производить вдоль маятника. Отличие системы Крукенберга от аппаратов Цандера заключается прежде всего в величине экскурсий движения. В то время как в аппарате Цандера величина экскурсий определяется каждый раз исходным положением рычага, соответственной установкой аппарата, в приборах Крукенберга эта экскурсионная величина в силу маятниковых движений может по желанию увеличиваться или уменьшаться. Аппараты Крукенберга служат гл. обр. для лечения мышечных атрофии, укрепления парализованных мышц, борьбы с тугоподвижностью сустава на почве мышечной атрофии. Для того чтобы иметь возможность произвести движение даже тогда, когда мышцы способны только на самое минимальное сокращение, аппараты Крукенберга снабжены приспособлениями, которые уравновешивают даже самую тяжесть членов тела. Ритмические, полуавтоматические движения, получаемые на аппарате Крукенберга, дают весьма полезный эффект и при лечении внутренних б-ней и б-ней нервной системы. По Герцу, недостатки этой системы заключаются в следующем: 1) объем движений строго ограничен объемом движений маятника; 2) быстрота колебаний зависит от длины маятника, почему для медленных движений необходимы длинные маятники.—К системе аппаратов Крукенберга примыкают еще аппараты системы Каро (Саго), состоящие из одного основного штатива, к которому прикрепляются отдельные части для разных суставов. Несмотря казалось бы на большое удобство такой системы (экономия места) аппараты эти имеют один существенный недостаток: они поглощают массу времени у врача и у б-ного на перестановку и укрепление частей. Там, где необходимо лечить большое количество больных, лучше от этой системы аппаратов отказаться. Система аппаратов Герца основана на принципе эксцентрика. Герц исходил из того, что нарастание и ослабление противодействия происходит по специальн. кривым, которые определяются с одной стороны анатомо-архитектурными особенностями суставов, а с другой—изменениями силы мышцы в различных фазах движения. Вычисляя при помощи специально сконструированного им динамометра напряжение силы мышц во время движения, Герц откладывал получаемые им величины на периферии круга по радиусам соответственно фазисам движения. Соединяя затем эти точки на месте поставленных величин, он получал кривую,

показывающую изменения напряжения мышцы данного сустава во время движения. Эти кривые Герц назвал суставно-мышечными диаграммами.—Герц дает пять групп аппаратов для следующих видов движений: активные движения с сопротивлением, качающие движения, самотормозящие движения, пассивные движения, аппараты для массажных приемов (вибрация, поколачи-вание и пр.).
Система аппаратов Тило построена на принципе блока. Устройство этого примитивного механотерапевтич. прибора заключается в следующем: через один или несколько блоков пропускается шнур, на одном конце к-рого подвешиваются разные тяжести—груз, на другом—сегмент упражняющейся конечности. Увеличивая или уменьшая тяжесть груза, а также изменяя расположение блоков и устанавливая их под разным углом, Тило достигает дозировки силы и изменения напряжения в разных фазисах движения. Классическим образцом прибора системы Тило является аппарат для упражнения пальцев: небольшая рама, на к-рой со всех четырех сторон приделано по блоку; рука опирается посередине на перекладину. Кончик пальца продевается в нитяную петлю, и т. о. мышцы пальцев упражняют-Рисунок 2. Аппарат Тило для ся во всех четырех упражнения пальцев. направлешшх? /е, производят сгибание, разгибание, абдукцию и аддукцию (рис. 2). К типу аппарата Тило примыкает универсальный аппарат W e r d е-gesund. Система эластической тяги. Аппараты этой системы можно разделить на несколько групп. К первой группе принадлежит прибор, где сопротивление производится посредством растяжения резиновой трубки. Образцом такого прибора является реставратор Гудйира (Goodyear), вторая группа приборов комбинирует резиновый шнур и блок. Примером такого прибора является блоковый аппарат. Общий недостаток этих двух групп аппаратов заключается в том, что 1) резиновая тяга оказывает мышцам постоянно возрастающее сопротивление; наиболее сильное сопротивление падает на конец мышечн. сокращения, т. е. на период, когда мышцы развивают наименьшую силу, что противоречит основным фи-зиол. принципам мышечной работы; 2) расг тяжимость резины очень быстро уменьшается, и т. о. утрачивается представление о сопротивлении. Система пружинной тяги. Эта группа аппаратов построена на основании применения пружины. Примером может служить аппарат для сгибания и разгибания предплечья и голени (рис. 3 и 4). В заключение следует упомянуть об очень простых, но удобных, в особенности в домашней обстановке, аппаратах для упражнения голен-ностопного и кистевого суставов сист. Ге-ермана (Heermann). Построены они на принципе полозьеподобных качелей. В виде об – разца показана ножная качель (рисунок о). Для лечения тугоподвижности суставов-* пальцев применяется прибор Альсберга(А1з-.-^«=^-_______& berg) (рис. 6). Между двумя раскачивающимися колесами укрепля— Рисунок 4. Аппарат Moring’a для сгибания и разгибания предплечья. 4. Аппарат Moring’a для сгибания и разгибания голени. ются посередине посредством ремешка пальцы. Взмах этих колес производит сгибание и разгибание. Наконец следует упомянуть. о лечении тугоподвижности челюстных суставов, при котором широкое распространение имеют роторасширители Гейстера (Hei— ster), пробковые, деревянные клинья, вставляемые между зубным рядом и т. п. Техника М. При упражнении на аппаратах (развитие мышц или движений в суставах) независимо от того, какого типа аппарат или к какой системе он принадлежит, необходимо соблюдать: 1. Правильную установку движущегося сегмента-конечности на аппарате, а именно—ось аппарата должна совпадать строго с осью сочленения, к-рое движется. Требование сов~
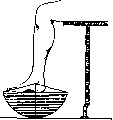
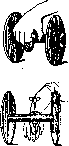
Рисунок 5.
РИС. 6. Рисунок 5.& Аппарат Heermann’а для упражнения голенностопного сустава. 6.& Аппарат Alsberg’a для упражнения пальцев. падения осей достижимо не для всех сочленений. Так напр. насколько легко применение этого требования при сгибании колена ю. стопы, локтя, подъема плеча вперед и в сторону, настолько сложно соблюдение этого правила при повороте плеча и бедра и при боковых движениях ноги в тазовом сочленении. Объясняется это сложностью анато-мич. устройства данных суставов. 2. Правильное исходное поло же ние сво – бодных частей упражняющейся конечности вне аппарата, а также правильное стояние туловища. 3.Правильную фиксацию упражняющегося сегмента конечности на аппарате. Фиксация конечности на аппарате имеет в виду обеспечить непосредственный перенос движения аппарата на упражняющуюся часть тела. От степени фиксации в нек-рых случаях зависит полезное действие аппарата. Как правило фиксация не должна стеснять свободы движений в сочленениях и нарушать кровообращения в тканях движущейся конечности. Сильная фиксация конечности вредно отражается на эластичности мышцы. Прямым показанием для фиксации конечности на аппарате является также необходимость исключения сопутствующих движений. Так, при тугоподвиж-ности тазобедренного сустава необходимо тщательно обращать внимание на то, чтобы изолировать сопутствующее движение таза, при упражнении тугоподвижности плечевого сустава—исключить совместное движение лопатки и т. п. Изолирование движения таза от бедра при тугоподвижности тазобедренного сустава является до настоящ. времени в М. проблемой, окончательно не разрешенной. 4. Правильную дозировку (нагрузку). Дозирование упражнений есть самый важный и в то же время самый трудный вопрос в механотерапии. Как общее правило мышечное упражнение нужно начинать лучше без всякой нагрузки. К нагрузке следует переходить незаметно и постепенно. Нагрузка должна увеличиваться по мере нарастания мышечной силы, причем необходимо соблюдать требование, чтобы возрастающее сопротивление находилось всегда в строгом соответствии со способностью мышц к работе. Показания и противопоказания. Показания для направления больных для гимнастики на аппаратах в сущности те же, что и для врачебной гимнастики. Необходимо только иметь в виду, что выбор упражнений в М., а также показания для применения значительно более ограничены, нежели это имеет место по отношению к гимнастике. Это происходит оттого, что, в то время как во врач. гимнастике мы имеем возможность в любой момент изменить в любом направлении ручные способы воздействия, в М, при стандартизации механо-терап. приборов (система осевых движений— обязательное условие совпадения осей суставов с осью аппарата) это не всегда представляется возможным сделать. Этот-то момент и явился причиной того, что М., имевшая в 19 в. бурный расцвет, скоро должна была остановиться, ограничившись в дальнейшем введением только различных изменений и усовершенствований в пределах того, что уже было достигнуто. Лит.: Баранцевич Е., Механотерапия в борьбе с травматизмом, Вопр. здравоохр., 1928, № 20; В е р б о в А., Кинезиотерапия (Основы терапии под ред. С. Бруштейна и Д. Плетнева, т. Ill, M.—Л., 1927); он же; Механические методы лечения (Руководство по физическим методам лечения под ред. С. Бруштейна, полутом I, Л., 1927); Г р е б н е р Ф., Механотерапия, Одесса, 1907; Соловьев К., Руководство по механотерапии, ч. 1—2, М., 1912; Ц у-керман В., Значение механотерапии в деле восстановления трудоспособности при заболеваниях двигательного аппарата, Ортопедия и травматология, 1928, № 6; Cyriax E., Collected papers on me-chano-therapeutics, L., 1924; Fraikin Q. et G-renier de Cardinal H., Mecanothera-pie, P., 1909; Herz M., Lehrbuch der Heilgvm-nastik, В.—Wien, 1903; Krukenberg H., Lehrbuch der mechanischen Heilmethoden, Stuttgart, 1896; Scholz F., Grundriss der Mechanotherapie, Jena, 1910; Zander G., Schwedische Heilgymnas-tik, Lpz., 1901. См. также литературу к статье Гимнастика. & А. Вербов.